Am Anfang war die Idee: Eine Wordclock soll es sein! Die Original-Anordnung 11×10 Buchstaben war mir zu einfach, es gibt aber von heise eine Wordclock mit 12×12 Buchstaben. Da es keine passenden Folien mehr zu kaufen gibt, lag das Projekt eine ganze Weile auf Eis. Nachdem dann der Lasercutter im Space aufgebaut wurde, nahm das ganze wieder Fahrt auf. Die Schnittvorlage habe ich in Inkscape gezeichnet. Eine Besonderheit dabei ist, dass die Frontplatte aus vier Teilen besteht, weil der Laser nicht die ganze Platte am Stück schneiden kann.
Inspiriert von einer netten Email aus Berlin (Gruß an Sebastian an dieser Stelle) bin ich zu Gerstaecker Künstlerbedarf gefahren und habe mir dort Polystyrolkugeln gekauft, um daraus den Körper der Wolke zu bauen. Aufgereiht habe ich die Halbkugeln auf einer Gewindestange, fixiert mit Muttern und Heißkleber. Ja, das Gebilde sieht aus wie Frosty, the Snowman, danke für den mehrfachen Hinweis 😀 Auf die Grundform habe ich dann meine LEDs aufgeklebt. Bis jetzt scheint der eigene Klebestreifen des Strips auf dem Polystyrol gut zu halten. (mehr …)
Langsam geht die Sommerpause zu Ende, da kann man mal wieder über Projekte bloggen!
Inspiriert von Richard Clarkson baue ich eine Gewitterwolkenlampe. Kurz gesagt, eine Lampe in Wolkenform, in der mit LEDs Wetterleuchten oder Blitze simuliert werden. Das Original „The Cloud“ ist beim Designer direkt bestellbar für $3360, ich versuche bei den Kosten darunter zu bleiben. 😉 (mehr …)
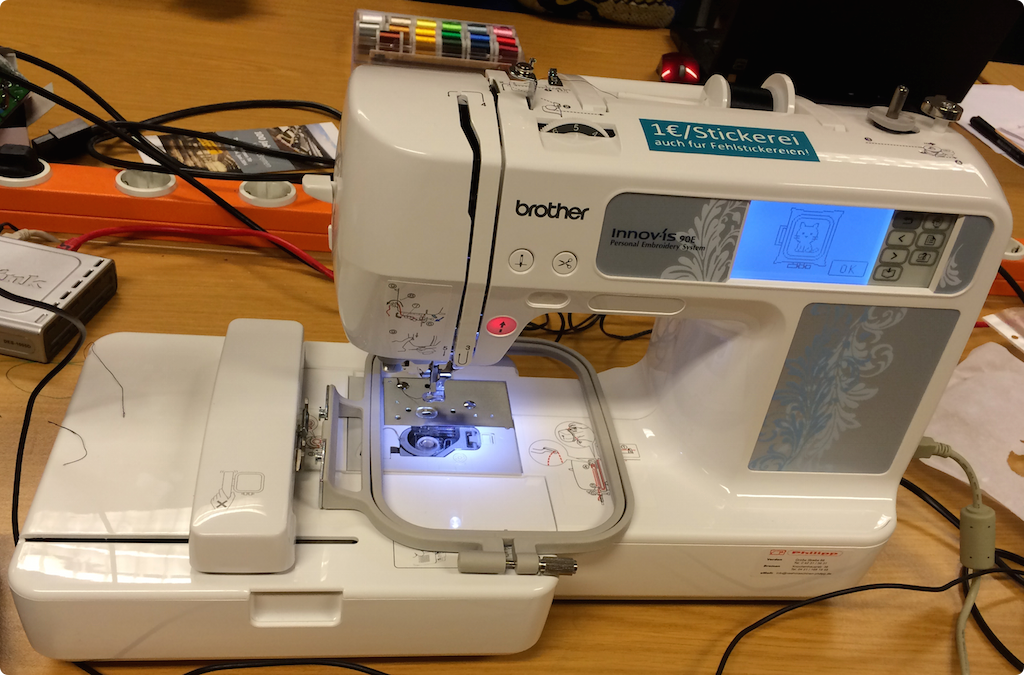
Ja, da soll noch einmal jemand behaupten, Hacker hätten wenig Interesse an Nadelarbeiten. Sobald man die Nadel programmieren kann, wird die Sache interessant. Das zeigte sich auch gleich am vergangenen Dienstag (10. Juni 2014) wieder, denn der Hackerspace war wieder einmal bestens gefüllt, trotz der hochsommerlichen Temperaturen im Innenraum.
Die Einführung in die neu erworbene Stickmaschine ist eine sehr spannende und bereichernde Veranstaltung gewesen. Vor allem die per Webcam auf dem Beamer verfolgbare Prozedur, in nur 7 Schritten einen Faden einzulegen, war durchaus beeindruckend für Menschen, die noch nie eine komplexere, elektronische Nähmaschine benutzt haben. (mehr …)
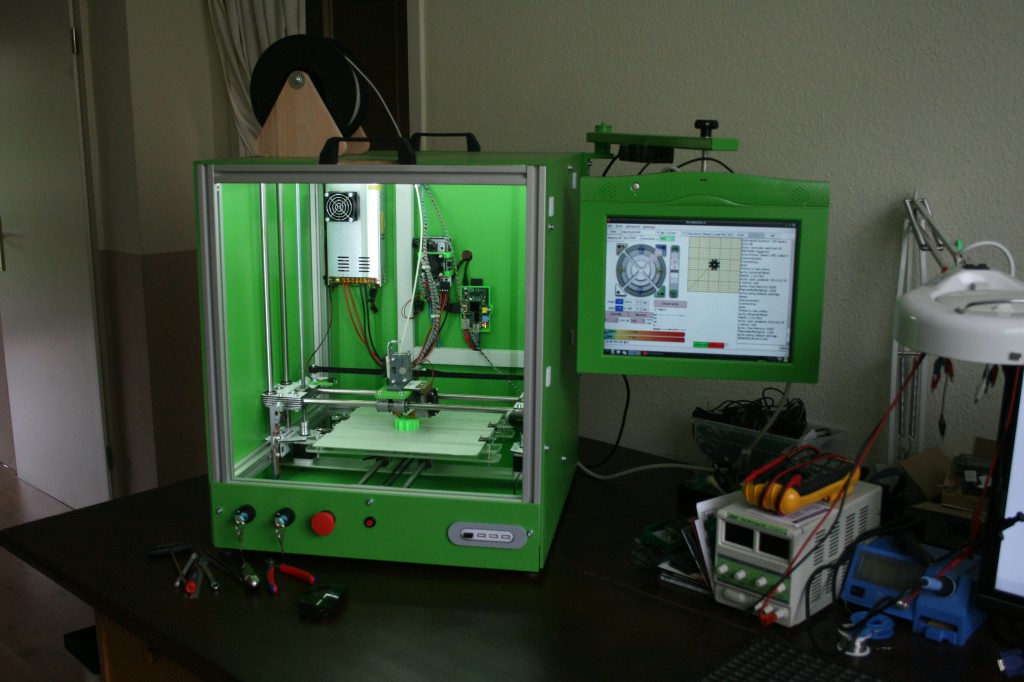
Bereits auf der Maker Faire 2013 konnte man ihn erstmalig bewundern: Der selbst konstruierte 3D-Drucker von Andree, liebevoll auch „Green Monster“ genannt, war ein echter Publikumsmagnet. Andree stand als Gesprächspartner auf der Messe zur Verfügung und hat vielen Interessierten hilfreiche Tipps und Tricks für den Bau ähnlicher Projekte mit auf den Weg gegeben.
Seit dem hat sich auch Andrees Drucker stetig weiterentwickelt. Steuerungselemente sowie ein Not-Aus-Schalter wurden integriert, und eine Webcam streamt das Bild live ins Netz. Das kommt dem Komfort zu gute: Der Drucker kann unbeaufsichtigt ein paar Stockwerke tiefer seiner Arbeit nachgehen, während man trotzdem bequem vom Sofa aus verfolgen kann, wie das Ergebnis sich Schicht für Schicht der Fertigstellung nähert.
Wie im letzten Eintrag angekündigt, steht zur Zeit das Design der Körperteile meines Hexapods auf dem Plan.
OpenSCAD
OpenSCAD ist, wie der Name schon andeutet, ein OpenSource CAD Programm. Ich habe mehrere CAD Programme ausprobiert, z.B. FreeCad, Blender, aber die haben sich mir nicht wirklich erschlossen. Bei OpenSCAD programmiert man seine Objekte in einer reinen Textsprache, wodurch man einerseits sehr gute Kontrolle hat, zum anderen kann man komplexere Objekte per Skript erstellen. Letzteres habe ich genutzt, um den sinusförmigen Körper mit Python zu erstellen:
Wer schon einmal bei uns im Space war, hat sicherlich auch bereits unseren 3D-Drucker bestaunt. An diesem Wochenende geben zwei unserer Mitglieder noch mehr Auskunft über dieses Gerät.
Gestern war unser Gründungsmitglied Andree zu Gast bei Apfeltalk.de. Dort hat er seinen selbstgebauten 3D-Drucker vorgestellt und Fragen über das 3D-Drucken und unseren Verein beantwortet. Die komplette Sendung könnt ihr hier auch nachträglich verfolgen:
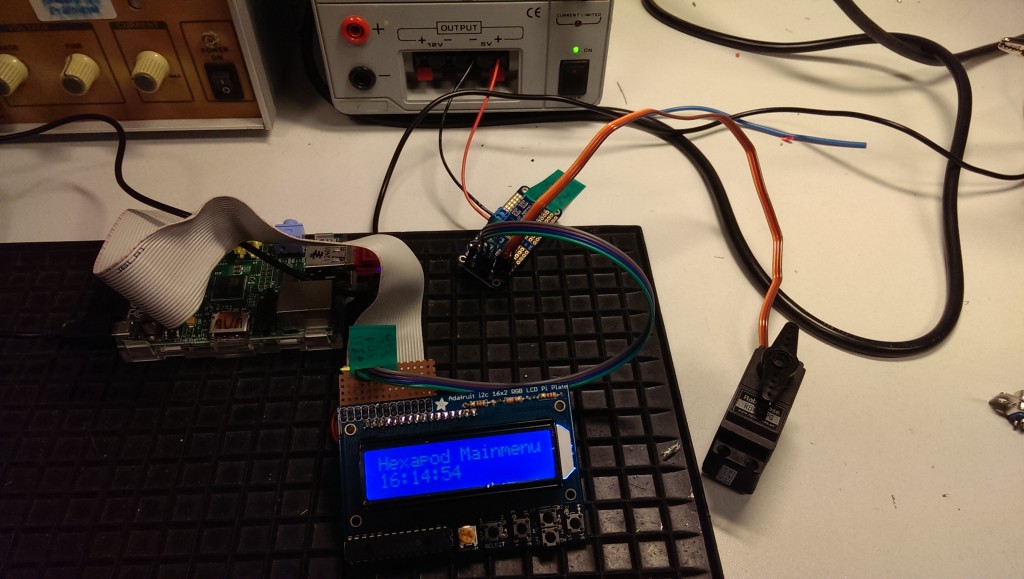
Testaufbau mit Raspberry Pi, Display, PWM Treiber und Servo
Das Gehirn
Wie schon im Intro erwähnt, wird das Gehirn des Roboters ein Raspberry Pi Rev.2. Der RasPi kommuniziert per USB-WLAN-Dongle mit der Welt und ist ansonsten out of the box. Die weitere Hardware wird per I2C angeschlossen. Als Betriebssystem läuft ein normales Raspbian ohne X-Server, weil ich sowieso nicht plane einen Monitor anzuschließen.